The Deterministic Edge: Why Your Next Vehicle Architecture Needs 10BASE-T1S
When I first transitioned into Automotive Ethernet projects, I assumed it would be straightforward after all, Ethernet is a technology we’ve used for decades. However, I quickly realized that the automotive domain is a completely different game; it isn’t just about moving data, but about absolute determinism, safety, and real-time constraints within a highly constrained environment.
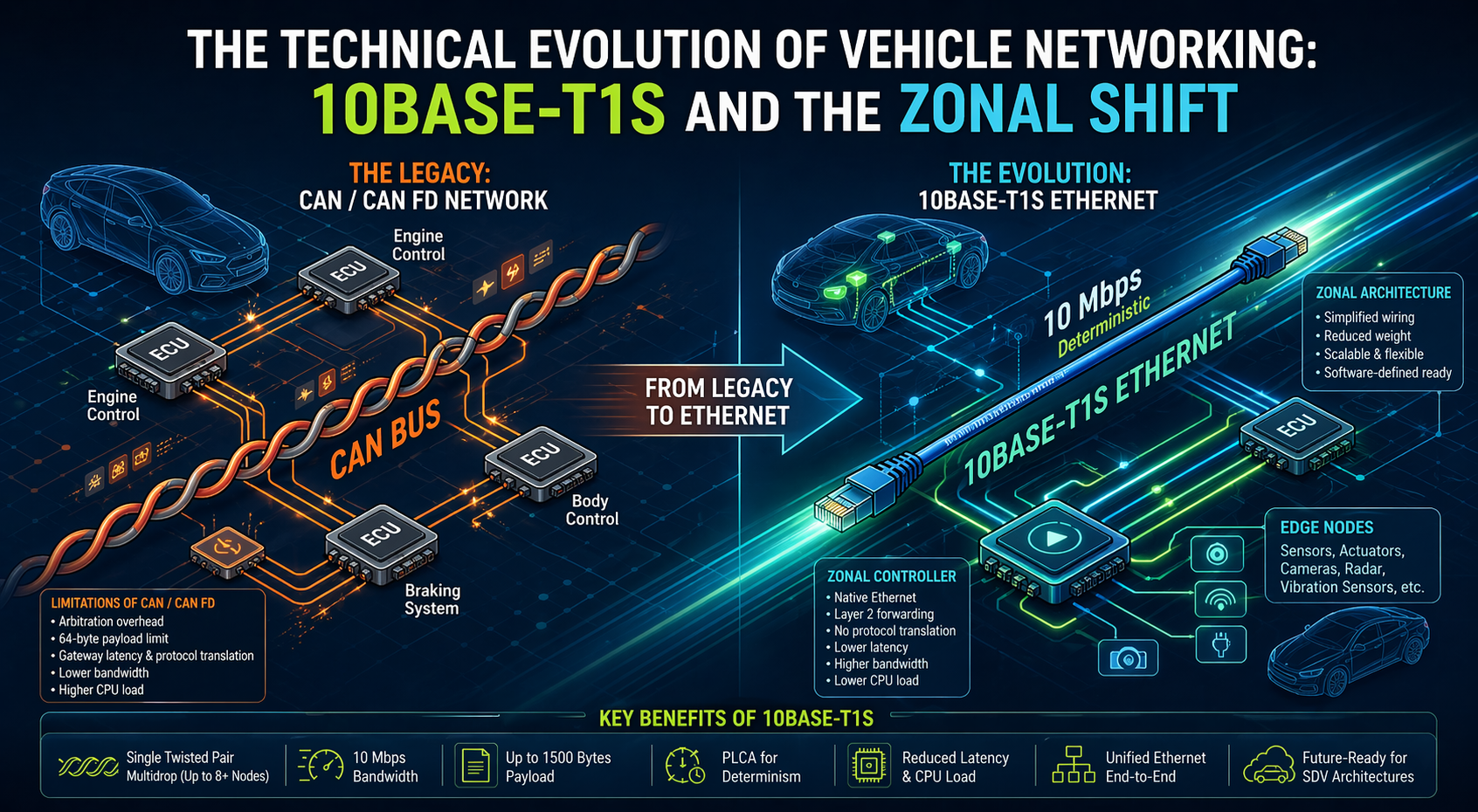
As vehicles evolve into software-defined systems, the traditional model of heavy wiring harnesses and distributed ECUs is giving way to zonal E/E architectures. This shift reduces complexity, weight, and cost, while enabling scalable and flexible designs.
While CAN and CAN FD still play a role in legacy systems, they fall short of meeting the growing demand for high bandwidth and unified communication.
This is where technologies like 10BASE-T1S come in – extending Ethernet all the way to the vehicle edge. With its single twisted pair and multidrop topology, it enables seamless connectivity to sensors and actuators, making it a key building block for next-generation in-vehicle networks.
Technical Constraints of CAN, CAN FD
Despite their reliability, legacy CAN-based protocols face fundamental physical and architectural limitations:
- Arbitration Overhead: CAN uses CSMA/CR (Collision Resolution) where high-priority messages win the bus, but low-priority data can be delayed indefinitely during heavy traffic.
- Payload Inefficiency: CAN FD is limited to a 64-byte payload, which is insufficient for modern high-resolution sensors.
- Gateway Latency: Traditional architectures require a protocol translation gateway to convert CAN messages into Ethernet packets, adding significant CPU processing overhead and latency.
10BASE-T1S: The “Missing Link” at the Edge
Ethernet, particularly 10BASE-T1S, is increasingly being preferred over CAN in modern automotive architectures, not just for its higher bandwidth but for the architectural simplicity it brings. In traditional CAN-based systems, data from edge nodes must pass through protocol translation gateways before reaching the Ethernet backbone, introducing additional processing overhead and latency. By extending native Ethernet directly to the edge, 10BASE-T1S removes the need for such translation layers, enabling more efficient data flow through simple Layer 2 forwarding. This shift allows vehicles to move toward a unified network model, reducing software complexity while improving scalability and integration.
Key reasons for choosing Ethernet over CAN:
- It operates over a single unshielded twisted pair (UTP) cable, supporting multiple nodes (up to 8 or more) on a bus segment of approximately 25 meters.
- Eliminates protocol translation, reducing latency and processing overhead
- Provides higher bandwidth (10 Mbps) for data-intensive applications
- Supports larger payloads (~1500 bytes), improving efficiency
- Supports optional jumbo frames (up to ~9 KB in many implementations), enabling more data per packet and reducing protocol overhead.
- Lowers CPU load through direct Ethernet communication
- Simplifies overall network architecture with a unified protocol
- Enables deterministic communication using PLCA with fair access
- Reduces wiring complexity while supporting scalable multi-node networks
- Prepares the system for future software-defined vehicle architectures
Deep Dive: PLCA (Physical Layer Collision Avoidance)
CAN networks rely on arbitration, where higher-priority messages win access to the bus. While this works well for critical traffic, low-priority messages can be delayed during periods of heavy bus activity.
10BASE-T1S introduces PLCA (Physical Layer Collision Avoidance) to address this challenge.
Benefits of PLCA
- Predictable timing through scheduled transmit opportunities.
- Collision-free communication.
- Deterministic and bounded latency.
- Fair access for every node on the network.
PLCA works like a round-robin scheduler. Each node gets its own transmit opportunity, ensuring every sensor has a predictable turn to communicate.
Architectural Advantages: Zonal Integration
In a Zonal Architecture, the vehicle is divided into physical zones, each managed by a Zonal Controller.
- No Protocol Translation: Because 10BASE-T1S is native Ethernet, data can move through simple Layer 2 bridges to the backbone without being reformatted.
- Reduced Software Complexity: Using a single protocol stack from edge to cloud simplifies software maintenance and accelerates the deployment of Over-the-Air (OTA) updates.
- Weight Reduction: Moving multiple ECUs onto a single twisted pair significantly reduces the complexity and weight of the vehicle’s wiring harness.

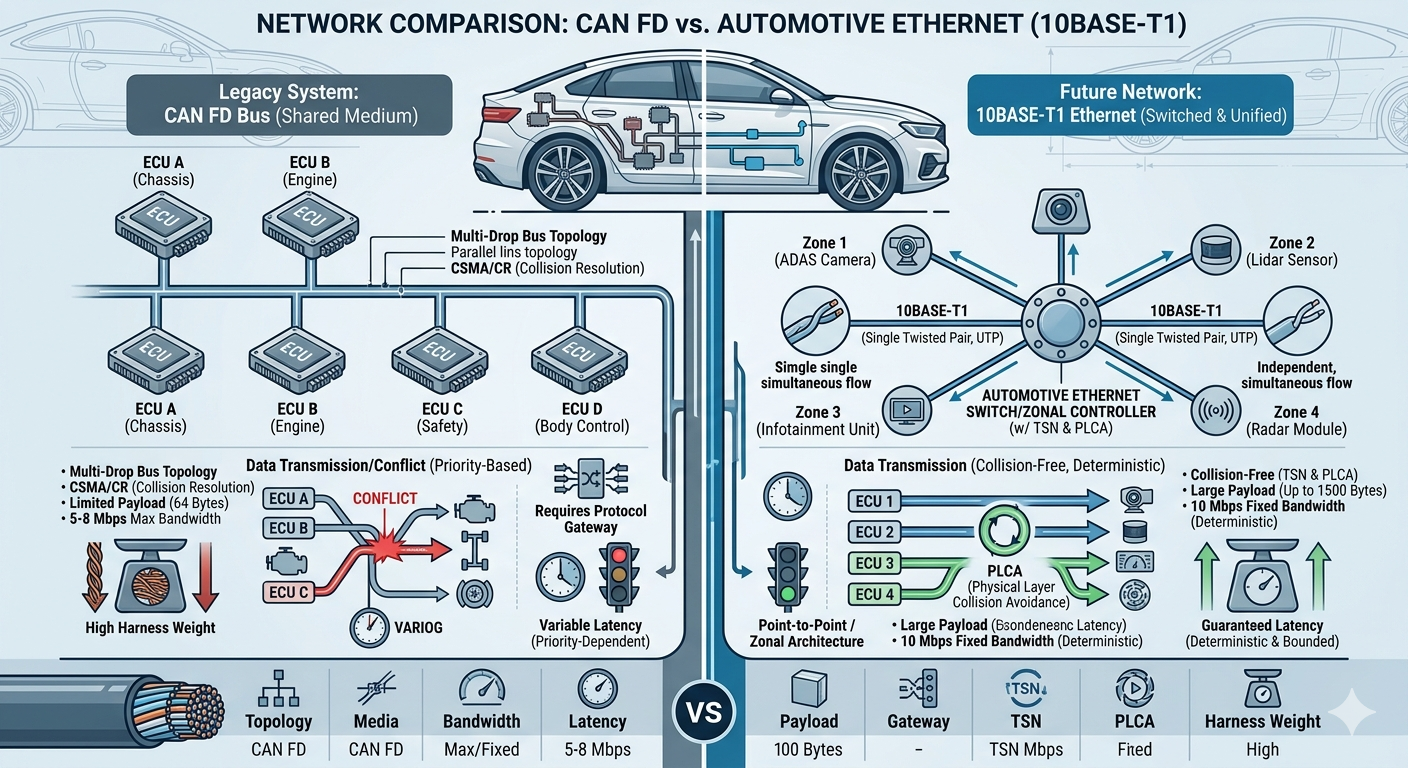
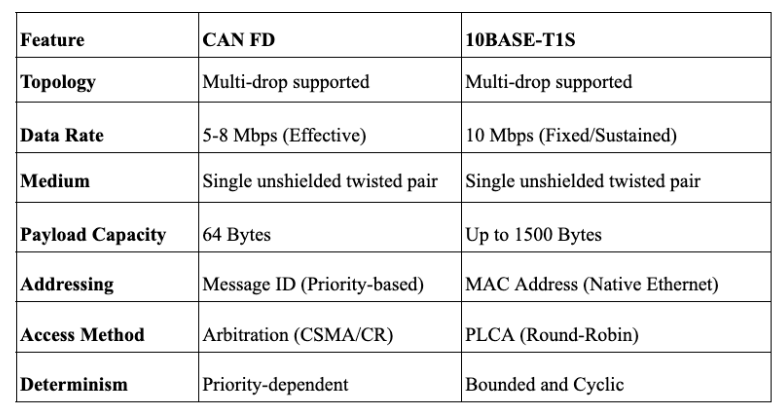
Technical Comparison: CAN FD vs. 10BASE-T1S
To understand why 10BASE-T1S is often described as the “Ethernet version of CAN,” it is useful to compare the features directly.
Tuning 10BASE-T1S for Determinism
To achieve deterministic and collision-free communication, the PLCA coordinator must be configured carefully.
Key Parameters
Transmit Opportunity (TO)
- This is the basic timing slot of the PLCA cycle.
- A typical TO value is around 2.5 µs, which is enough to account for propagation delays while minimizing wasted bus time.
Maximum Burst Length
- Burst length determines how many Ethernet frames a node can send during one transmit opportunity.
- Larger burst lengths help high-bandwidth devices such as cameras, radar modules, or vibration sensors.
- However, excessively large burst lengths can increase latency for the rest of the network.
Node Count
- The PLCA coordinator should be configured with the actual number of active nodes.
- This avoids wasting time on unused transmit slots and helps create a tightly bounded cycle time.
Conclusion: The Foundation for the Future
10BASE-T1S combines the wiring simplicity of CAN with the speed, payload capacity, and protocol consistency of Ethernet.
For automotive OEMs and Tier 1 suppliers building next-generation zonal architectures, it provides a practical migration path from legacy fieldbus networks to a unified Ethernet platform.
Instead of adding more gateways, more protocol translation, and more software complexity, Ethernet can now extend directly to the edge of the vehicle.
That is why 10BASE-T1S is becoming one of the most important networking technologies for the future of automotive zonal architecture.