Imagine a world where your car is as constantly evolving as your smartphone. That’s the promise of Software-Defined Vehicles (SDVs). These aren’t just cars with fancy screens; they’re computers on wheels, capable of learning, adapting, and improving over time.
Simply put, a Software-Defined Vehicle (SDV) is an advanced automotive, where a software manage and controls most of the vehicle functionality. From engine performance and braking systems to infotainment and navigation, software orchestrates nearly every aspect of the vehicle. This shift to software-centric design offers greater flexibility and enables more frequent updates and enhancements than traditional hardware-based systems.
But what’s holding back this automotive revolution?
The shift to SDVs introduces several challenges that must be addressed to realize their full potential.
One significant challenge is increasing systemic complexity. As vehicles become more software-driven, managing the numerous software functions and updates becomes increasingly unwieldy. The emergence of new Electrical/Electronic (E/E) architectures further complicates this landscape, necessitating robust systems that can handle this complexity. Additionally, testing and validating millions of lines of software code is a daunting task that requires precision and thoroughness to ensure safety and performance. With product cycles shortening, the pressure to bring vehicles to market quickly while ensuring quality adds another layer of difficulty.
Moreover, the availability of test benches and Hardware-in-the-Loop (HIL) systems is becoming a critical bottleneck as the number of software engineers working on automotive software increases. Automotive companies and OEMs are investing heavily in these systems to validate software in realistic, hardware-interactive environments. However, as the demand for such systems rises, traditional approaches may not scale effectively, especially given the need for cloud-based development to handle the volume and complexity of modern vehicle software.
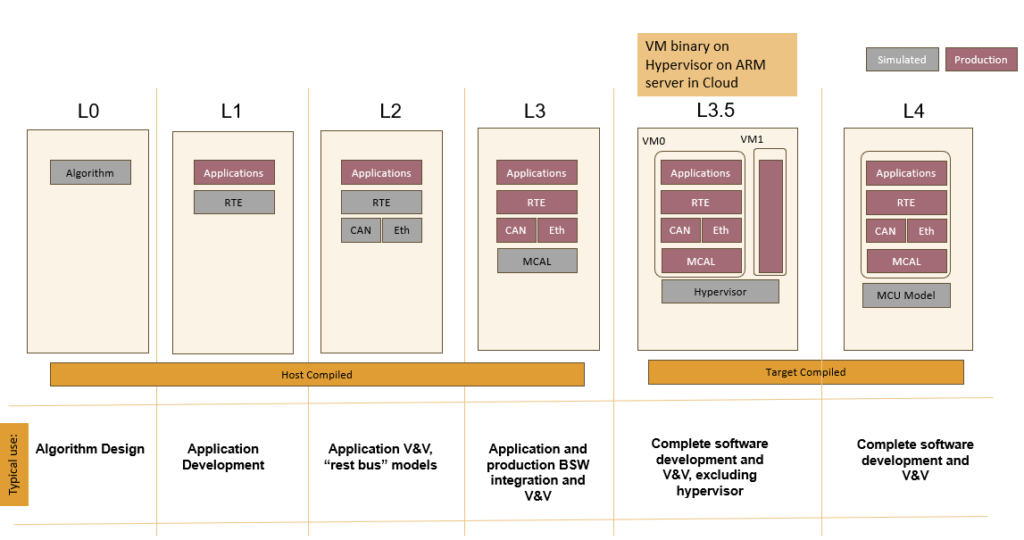
This is where Virtual ECUs come into play. By virtualizing the Electronic Control Units (ECUs), developers can simulate and test software in a virtual environment, addressing many of the challenges associated with SDVs. Virtual ECUs are an essential tool for tackling systemic complexity by providing a scalable and flexible software development and testing platform. They enable comprehensive validation of software before it is deployed to physical hardware, significantly reducing the time and cost associated
Different Levels of Virtual ECU