Introduction
OpenSCENARIO (OSC) is an industry-standard format used to describe the dynamic elements of driving simulation scenarios. The standard consists of two major components: OpenSCENARIO DSL, a domain-specific language intended for high-level scenario authoring, and OpenSCENARIO XML, a structured XML-based format for defining detailed, tool-independent simulation scenarios. While the DSL aims to make scenario creation more intuitive for users, the XML format provides the underlying structure used by simulators to interpret maneuvers, events, triggers, and the conditions governing vehicle behavior.
Scenario-based testing has become essential in autonomous vehicle (AV) development, as AV systems must demonstrate safe performance across a wide range of realistic and repeatable traffic conditions. The OSC XML standard supports this requirement by offering a consistent and scalable way to model these scenarios across different simulation and validation platforms.
In this blog, the focus will be on the OSC XML standard, explaining its structure, core components, and practical usage. I will begin with the basic building blocks of the XML format and then explore how maneuvers, triggers, and events work together in a simple example scenario. The goal is to provide a clear and structured introduction for anyone starting their journey with OSC XML.
Role In Development
OSC XML plays a vital role in autonomous vehicle development by allowing engineers to define vehicle behaviors, environmental conditions, and interactions with other road users in a structured, standardized format. This enables systematic testing of algorithms and software components, helping identify potential issues early in the design cycle and reducing costly development iterations. For OEMs, OSC XML provides a way to validate vehicle performance without relying solely on physical testing, ensuring that vehicles meet safety standards and regulatory requirements consistently while facilitating collaboration across teams and suppliers. Additionally, in verification and validation (V&V) processes, OSC XML supports automated, repeatable testing, allowing engineers to cover complex traffic situations and edge cases that are difficult to replicate in real-world conditions. By improving test coverage and confidence in vehicle behavior, OSC XML ultimately enhances the safety, reliability, and efficiency of autonomous vehicle development.
Basics of OSC XML
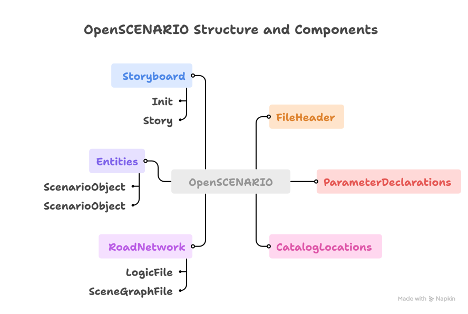
OSC XML is built on a structured XML schema that defines how scenarios are organized and executed within a simulation environment. Each OSC XML file follows a hierarchical model, ensuring clarity and predictability in how simulation events unfold. Understanding this structure is the first step toward creating robust and reusable scenarios for autonomous vehicle (AV) testing.