
Left-shifting system-level ADS/ADAS testing
Modern automotive software development remains heavily constrained by access to physical hardware. Scarce HIL benches and vehicle prototypes push system validation late in the development cycle and create long feedback loops. Beyond hardware availability, ADAS and ADS teams commonly face:
- Late issue discovery: Integration bugs are often found during HIL testing or on-road validation, forcing costly iterations late in the project.
- Limited scenario coverage: Physical testing makes it impractical to validate edge cases, adverse weather, and rare traffic scenarios critical for ADAS/ADS safety.
- Behavioural parity gaps: Traditional simulation setups often diverge from real vehicle behaviour, creating a trust gap in simulation results.
- Regression testing bottlenecks: Each software update requires re-validation on hardware, slowing down iterative development.
To address these challenges, Vayavya Labs and RemotiveLabs collaborated on an integration that enables high-fidelity, system-level ADS SIL testing, allowing validation to move earlier without sacrificing confidence in system behaviour.
Reducing hardware dependency through system-level SIL validation
RemotiveLabs provides the foundational RemotiveTopology platform, a lightweight simulation platform designed for modular vehicle development across SIL and HIL. The technology enables developers to run virtual ECUs within realistic E/E architectures, supporting early interface validation and “left-shift” testing before physical hardware is available. RemotiveTopology enables development teams to start integration testing from day one. It integrates into existing automotive toolchains as well as modern software tooling, e.g., Jupyter, pytest, Wireshark, and more.
Vayavya Labs brings deep engineering expertise in Automotive SIL verification and validation (V&V). In the context of ADS validation, this framework is designed to be simulator-agnostic, providing the capability to integrate various simulators to bridge the gap between ECU network communication and high-fidelity vehicle behavior. For this specific collaboration, Vayavya Labs has utilized this framework to build the integration between RemotiveTopology and the CARLA simulator, ensuring the ECU logic fidelity and bidirectional system integration necessary for production-grade testing. With Vayavya Labs’ contribution, the Software development team will have access to increasingly fidelity all through the project.
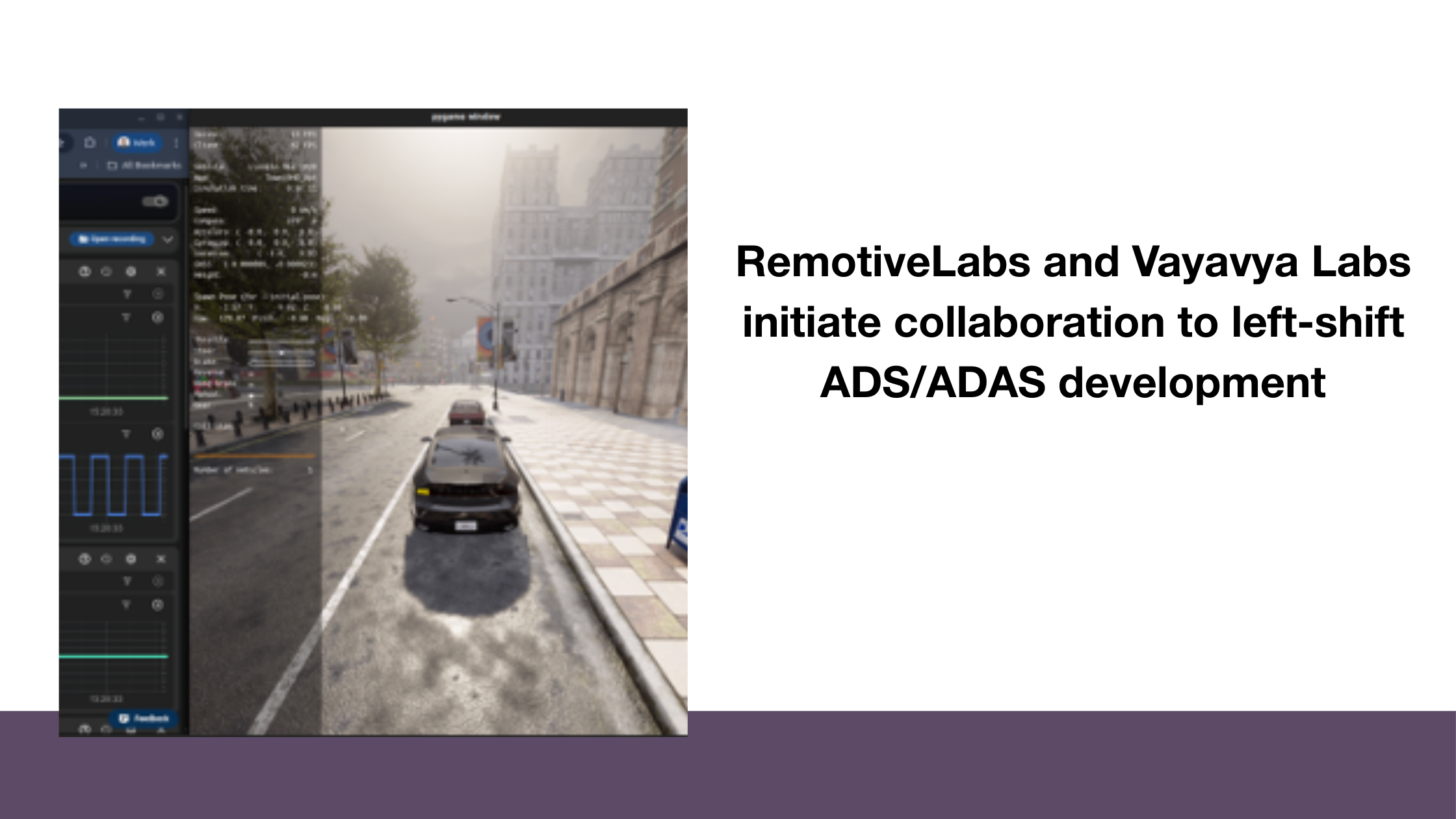
The result of the collaboration is a unified setup where ECU behavioural models, CAN/SomeIP network communication, and visual vehicle behaviour operate together. System behaviour becomes visible, observable, and debuggable already in SIL, rather than reconstructed later in HIL. The integration Vayavya Labs built focuses on three core principles:
ECU logic fidelity: The driving simulator does not run its own logic; it renders outputs from the actual ECU models. Example: a turn signal in CARLA is driven directly by the BCM state machine, validating real ECU behavior.
Unified control path: All inputs, automated scripts, or manual keyboard, go through the same CAN network path, so manual testing exercises the same code paths as automation.
Bidirectional system integration: Vehicle state (e.g., speed, position) generated by the simulator is fed back into the CAN network, enabling other ECUs to respond as they would in a production system.
“What makes this powerful is that the EE network and complete ADS V&V ecosystem is present already in SIL. Developers validate ADS behaviour together with the real ECU interactions and signal flow, which builds much higher confidence before moving into HIL.”
-Akshay Joshi, Staff Software Engineer ADS/ADAS, Vayavya Labs
https://www.youtube.com/watch?v=xypTULXCuWk
System-level testing of ADS/ADAS with the integration by Vayavya Labs
The integration utilizes a custom CARLA Client Module that bridges RemotiveTopology and the simulator. This module subscribes to CAN signals, translates them into CARLA control commands, and monitors vehicle state to publish updates back to the network. The technical architecture implements several sophisticated capabilities:
- Native RemotiveTopology integration: The CARLA client follows the standard BehavioralModel pattern used across RemotiveTopology ECU models.
- Multi-bus signal subscriptions (no fixed limit): The client subscribes to both driver input signals (e.g., SCCM-DriverCan0) and ECU output signals (e.g., BCM-BodyCan0). Additional CAN buses can be added as needed, there is no built-in limitation on the number of buses.
- Signal mapping and normalization: A dedicated SignalMapper handles range normalization and unit conversion (e.g., steering angle -819.2°…819.1° → CARLA -1.0…1.0), while preserving semantics and edge-triggered events such as gear shifts.
- Bidirectional state monitoring: Events from CARLA are sent back to the network, enabling the ECUs to process manual controls.
- Real-time event processing: CARLA runs on a 50 ms CAN cycle. Signals are applied on receipt while keeping timing aligned with ECU network requirements managed by the integration setup by Vayavya.
The result is a production-oriented setup where system behavior can be validated increasingly realistically in SIL, long before hardware is available.
“With Vayavya Labs, we found a team that shares our focus on collaboration, fast feedback, giving developers realistic system behaviour early, when it actually helps them to build better software.”
– Aleksander Filipov, CTO, RemotiveLabs
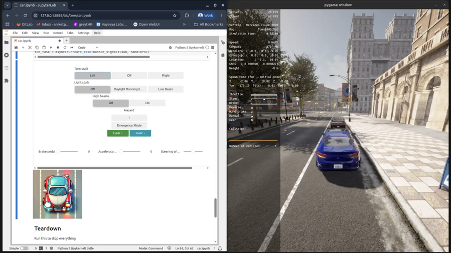
Vayayva Labs leveraging RemotiveLabs Jupyter notebook features to interact with the virtual vehicle and trigger scenarios in CARLA.
More value for ADS and ADAS testing in SIL
The integration by Vayavya Labs CoSimulation–RemotiveTopology integration demonstrates
a production-grade approach to system-level automotive simulation. By adhering to
architectural principles of high ECU logic fidelity and bidirectional control, Vayavya Labs
enables a validation environment that meaningfully bridges the gap between simulation and
physical testing.
For development teams, this translates into faster feedback loops before hardware is
available, broader and more repeatable scenario validation, and reduced dependency on
constrained usage of HIL benches and vehicle prototypes. The result is earlier issue
discovery, higher confidence in system behaviour, and a more scalable path toward safer,
more reliable ADAS and ADS software.