What is AUTOSAR?
AUTOSAR (Automotive Open System Architecture) is an open and standardized automotive software architecture for developing and integrating vehicle software. It defines the interfaces between software components, as well as the communication protocols used by the software components in a vehicle network.
AUTOSAR aims to address the increasing complexity of automotive Electronic Control Unit (ECU) software, which is responsible for controlling various functions in modern vehicles. It provides a layered architecture approach that separates the software into different layers, each with its own responsibilities and interfaces. This modular structure allows for the development of standardized software components that can be easily integrated into different vehicle ECU platforms.
By adopting AUTOSAR, automotive manufacturers and suppliers can benefit from increased efficiency, reduced development costs, and improved software quality. It allows for better collaboration between different stakeholders in the automotive industry, promoting innovation and standardization in software development for vehicles.
There are 2 types of files in Autosar:
1. Static Files
Static Code is the core Autosar Architecture that enables access to the on-chip peripherals of the ECU microcontroller. The Static Code file has an extension .c [dot c]. For example, the static code for CAN BUS Driver will be CAN.c. For CanIf, It will be CanIf.c, and so on for other BSW modules and the MCAL modules. Static Code is developed based on requirements specified in AUTOSAR Software Specifications. If the static code is developed based on Microcontroller Abstraction Layer (MCAL) Modules then we need to consider the Hardware specification as well. The AUTOSAR Software Specification consists of every software requirement that needs to be met by the developer. It consists of Application Programming Interface (API) details, parameters to be passed to the APIs, and their return value. Details like Data Types to be used and Configurable Parameters to be provided can also be found in this specification. Considering all these specifications, the Driver Static Code is developed.
2. Configuration Files
AUTOSAR Basic: In AUTOSAR, configuration files are an integral part of the software development process. They are used to define the behavior and properties of various software components and modules within an automotive system. Configuration files provide a flexible and modular approach to configuring the system and allow for easy customization and adaptation to different vehicle platforms. Software BSW/MCAL implies configuring specific parameters associated with a particular BSW Module/MCAL module. An example that helps you to understand better. A CAN MCAL driver needs to be configured with specific baud rates depending on the application. Here, the baud rate is the parameter that must be configured.
These source files consist of structures with elements such as configuration values. These configuration files are generated based on the values specified in the Parameters Definition File. The configuration values need to be fed to the peripheral registers, address pointers, macro definition, etc.
For demonstration purposes, I have created a plugin with a module name TEST and configured the same using EB Tresos Studio.
To generate these configuration files, we are required to use Tools.
Today we will look into one such tool called EB Tresos and create the plugin. This created plugin will be used to generate the configuration files as well.
Steps required to create a Plugin.
1. Create a folder by the name of the Module which you are developing in the mentioned path (Ex : C:EB/tresos/plugins)
![]()
2. After you create the base folder with the Module name, The base folder contains these subfolders which are required by the EB Tresos application.

- autosar – This folder contains the description file of the module.
- config – EB tresos cannot use the arxml file directly, so we need to convert them in the xdm format and copy that file in this folder.
- generate – This folder contains the Template based code generators, which help to generate the configuration files.
- generate_swcd – This folder contains the bsw_arxml file.
- include – Contains the header files of the particular module.
- META-INF – Manifest file, need to define the name of the module in this file and also the Java plugins which we need to include.
- src – Contains the source files of the particular module.
- anchors – Contains information about links to the documentation used for configuring the modules. 9. plugin – In this file, we need to specify the path of the arxml(xdm file), and generators and also provide version info about the module.
3. After you are done with creating the Plugin, Open the EB Tresos Application.(Ex : C:EB/tresos/bin).
4. The next step is to check if the Module is added successfully to the EB Tresos.
4.1. This is done by creating a project in the EB Tresos and below are the steps mentioned.

4.2. Click on Next, and a pop-up window will appear where ECU ID and Target are selected.

4.3. Click on Next, and a pop-up window will appear where we must select the MODULE for Configuration.
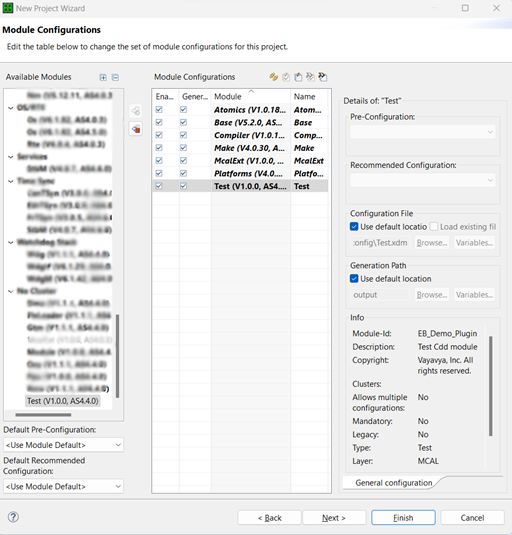
4.4. Click on Finish, and the project will be created in the EB Tresos which includes all the modules which you have selected.
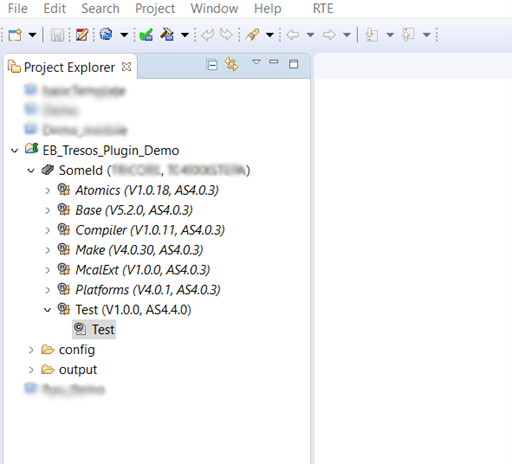
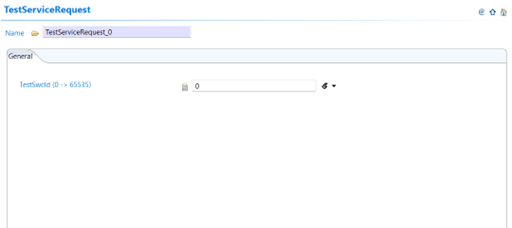
4.5. When you double-click on the Test Module, which will open up the GUI where you can configure the module.
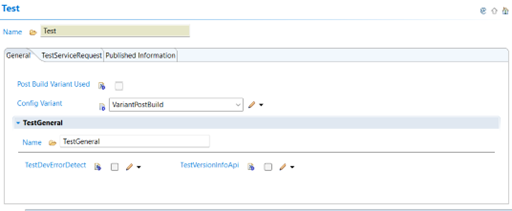
4.6. There are multiple containers in the Test Module that can be configured.

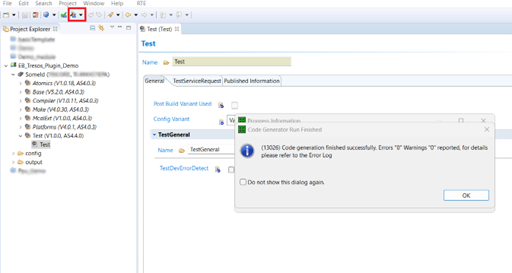
4.6. After all the configuration is done, click on verify to validate the configuration.

4.7. After verification is successful we can generate the configuration, by clicking on the generate icon.
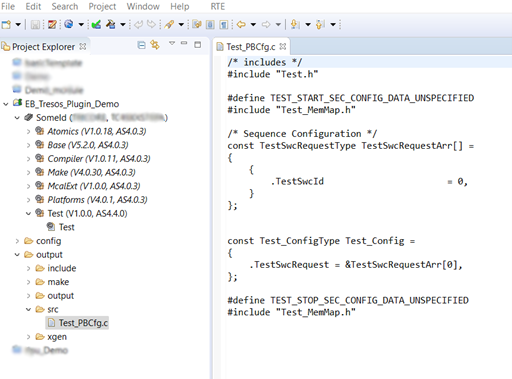
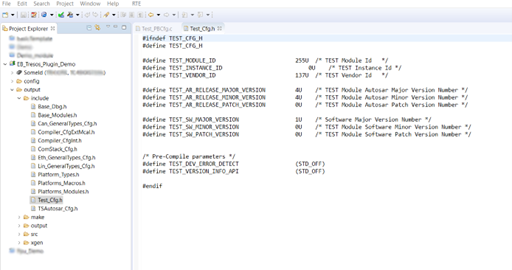
5. After all the configuration is done, the configuration files will be generated in the output directory present in the workspace. The snapshots of generated configuration are attached below.
Conclusion
Creating an EB Tresos plugin involves developing a software component that integrates with the EB Tresos tool suite, which is widely used for automotive software development in the context of AUTOSAR (AUTomotive Open System ARchitecture).
Here’s a summary of the key points involved in EB Tresos plugin creation:
- Understand Plugin Requirements: Before starting the development process, it is crucial to have a clear understanding of the desired functionality and purpose of the plugin. Identify the specific features or enhancements that the plugin should provide within the EB Tresos tool suite.
- Familiarize Yourself with Tresos Plugin Development Kit (PDK): EB Tresos offers a Plugin Development Kit (PDK) that provides the necessary APIs, documentation, and guidelines for developing plugins. Become familiar with the PDK to understand how to interface with the EB Tresos tool suite and utilize its functionalities.
- Plugin Development: Develop the plugin using the programming language specified by the PDK (). Leverage the provided APIs to interact with the EB Tresos tool suite, accessing its data, services, and functionalities. Implement the required features and ensure proper integration with the tool suite.
- Plugin Testing and Validation: Thoroughly test the plugin to ensure its functionality, stability, and compatibility with the EB Tresos tool suite. Perform both unit testing (testing individual plugin components) and integration testing (testing the plugin within the EB Tresos environment). Validate the plugin against the expected behavior and verify its correctness.
- Documentation and User Support: Prepare comprehensive documentation for the plugin, including installation instructions, usage guidelines, and any additional information that can assist users in effectively utilizing the plugin. Provide user support channels, such as forums or helpdesk, to address user queries and issues related to the plugin.
- Release and Distribution: Package the plugin for distribution, adhering to any licensing or distribution requirements. Determine the appropriate channels for distributing the plugin, such as through an official marketplace or directly to customers. Plan versioning and release management strategies to provide updates and bug fixes as necessary.
- Maintenance and Updates: Continuously monitor the plugin’s performance, gather user feedback, and address any reported issues or feature requests. Maintain compatibility with new versions of the EB Tresos tool suite and AUTOSAR standards, releasing updates or patches as required.
Ready to unlock the full potential of your automotive software development? Take the next step toward the future of automotive innovation with Vayavya Labs. Reach out to our experts for more information on this: Contact us here.
