Due to the need of autonomous driving and connection, vehicle networks are becoming increasingly complicated. This increase in data complexity necessitates higher bandwidth connectivity, which automakers are achieving using Ethernet-based networking. An expanded gateway system is utilized in the car to combine existing in-vehicle connections with high-speed Ethernet communication.
The system employs Ethernet as the external controller and gateway interface, and CAN as the communication interface between the internal controllers. In a heterogeneous communication environment, the vehicle gateway offers an interface for transferring vehicle data and connecting in real-time between the current CAN network protocol and the external Ethernet protocol. Time delay occurs during this routing procedure, and in an in-vehicle network environment where communication time is critical, this delay time must be taken into account and monitored during the development process. Because the external communication network’s participation creates a security vulnerability, a security function that ensures the message’s integrity against cybersecurity threats should be addressed. We look at the implications of delayed gateway routing on CAN and Ethernet frames, as well as security systems, in this study.
Quantitative comparison and analysis are carried out in the following inquiry utilizing two routing methods: direct routing without data modification when routing from CAN frame to Ethernet frame, and indirect routing for picking and transferring the required data. CMAC is used to protect the integrity of CAN network communications and Ethernet messages for security reasons.
The gateway is used to organize and manage the different controllers in the vehicle by functionality. The number of communication channels for gateways rises in lockstep with the number of controllers. In addition, to manage the growing volume of data, fast transmission speed is necessary. CAN communication is increasingly shifting to CAN-FD, and gateway systems with more than 10 channels are being launched, according to this trend.
The gateway uses Ethernet or Gigabit Ethernet to allow the different controllers to connect with the outside world. CAN/CAN-FD channels and Ethernet/Gigabit Ethernet channels are frequently required in modern gateways.
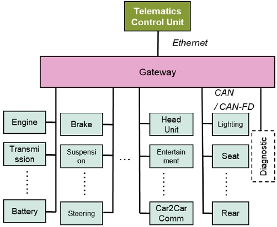
A vehicle gateway is depicted in the above figure. Engine and transmission control controllers are linked to one CAN bus as a drive-related domain, while brakes, steering, and suspension controllers are connected to a second CAN bus as a chassis domain. Telematics for wireless contact with the outside requires a rapid connection in order to send and receive huge amounts of data, hence it is connected to the gateway through Ethernet.
Two types of packets are being handled within the gateway:-
1. Non-Critical Packets.
2. Critical-Packets.
Non-Critical Packets are basically the TCP/UDP network packets & critical packets are the AVTP packets. Whenever time-sensitive audio-video data has to be transmitted over Ethernet, TSN comes into the picture and hence critical packets are used for creating this network.
Gateway Routing
Three security-conscious message routing strategies are used to implement Routing.
Routing
Implementation
Direct (without CMAC verification)
On the gateway, save all incoming data. Using many communication techniques to send the same data
Direct (with CMAC verification)
After CMAC integrity verification, store all incoming data on the gateway. Using many communication techniques to send the same data
In-direct (with CMAC verification and generation)
After CMAC integrity verification, store all incoming data on the gateway. After selecting the relevant data, the CMAC is produced. Using several communication technologies to send
Simulation on Linux PCs
The Ethernet-CAN gateway is successfully tested on Linux systems that have an x86 architecture; this design can be easily ported to any architecture having a Linux environment.
Setup
Basically, two systems are used, where one system acts as a Network consisting of Ethernet ECUs and the other system acts as a Gateway Interface and a Network consisting of CAN ECUs.
Let’s say PC1 acts as a Gateway Interface and a CAN ECU Network and PC2 acts as an Ethernet ECU Network. The picture below depicts the implementation.
Ethernet to CAN communication
When an Ethernet ECU wants to send a packet(request) to a CAN ECU, it has to pass through the gateway engine, the gateway engine will convert the incoming ethernet packets to the appropriate CAN format and send it over the CAN Network. The CAN ECU will respond back to the request that was sent from the ethernet ECU.
CAN to Ethernet communication
When a CAN ECU wants to send a frame(request) to an Ethernet ECU, it has to pass through the gateway engine, the gateway engine will convert the incoming CAN frames to the appropriate Ethernet Packet format and send it over the Ethernet network.
The request and response can be critical, non-critical, diagnostic data, etc.
Conclusion
The automotive industry has adopted Ethernet for in-vehicle communication and networking. Demand is accelerating for deterministic, high-performance Ethernet-based communication for Time-Sensitive Networking (TSN) standards. As the development activities and R&D continue we will see interesting solutions and software components built up specifically keeping in needs of the Automotive domain. Vayavya Labs provides software solutions for the adoption of Ethernet as a Connective component for any automotive application.