
Introduction
Accidents are critical indicators of flaws in the driving ecosystem. These flaws can stem from multiple factors, such as infrastructure, traffic routing, or human driver behavior. Understanding these scenarios is crucial for improving road safety, particularly in the context of the Safety of the Intended Functionality (SOTIF) framework. Multiple methods exist for reconstructing accident scenarios, ranging from traditional manual analysis to modern AI-driven approaches. In the first blog in this series, I will explore these methods.
Motivation For Studying Accidents
Accident Causation and the Swiss Cheese Model
One widely accepted perspective on accident causation is the Swiss cheese model, where multiple layers of defense exist, but weaknesses (“holes”) may align to allow an accident to occur.
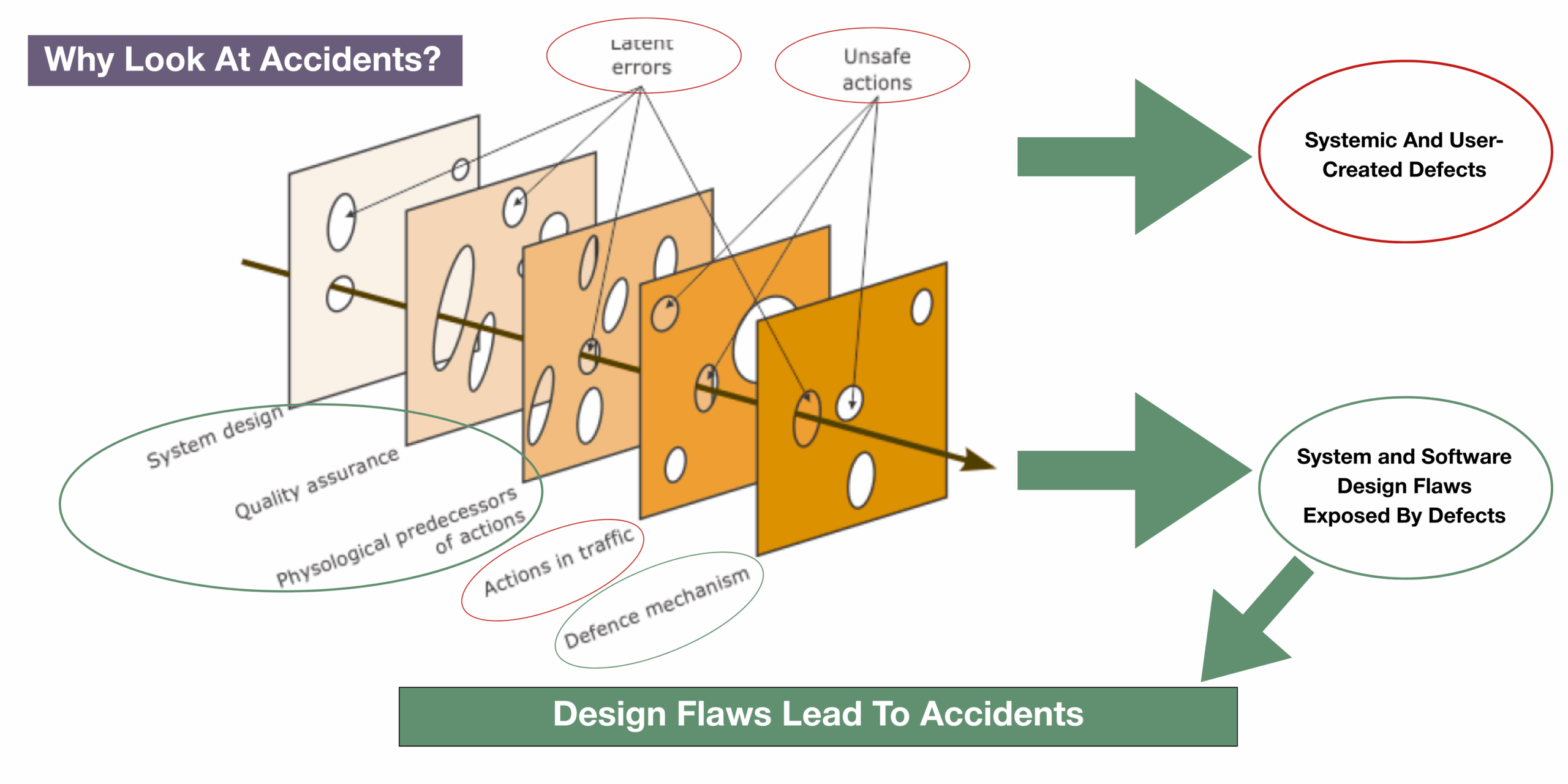
Figure 1: Swiss Cheese Model for Accidents.
Accident reconstruction methods aim to identify and analyze these aligned weaknesses, thereby transforming unknown and unsafe scenarios into known and safe ones.
The Role of SOTIF
The Safety of the Intended Functionality (ISO 21448 SOTIF) standard provides a structured approach to ensuring that systems behave safely not only under fault conditions, but also in situations where the system performs as intended, yet hazards still exist. Within this framework, hazards often arise from unknown scenarios, incorrect assumptions, or limitations in sensing and perception. Accident reconstruction supports SOTIF goals by:
- Identifying unknown unsafe scenarios through systematic analysis.
- Converting these unknowns into known conditions that can be analyzed, tested, and mitigated.
- Providing simulation-ready formats to assess system performance against realistic scenarios.
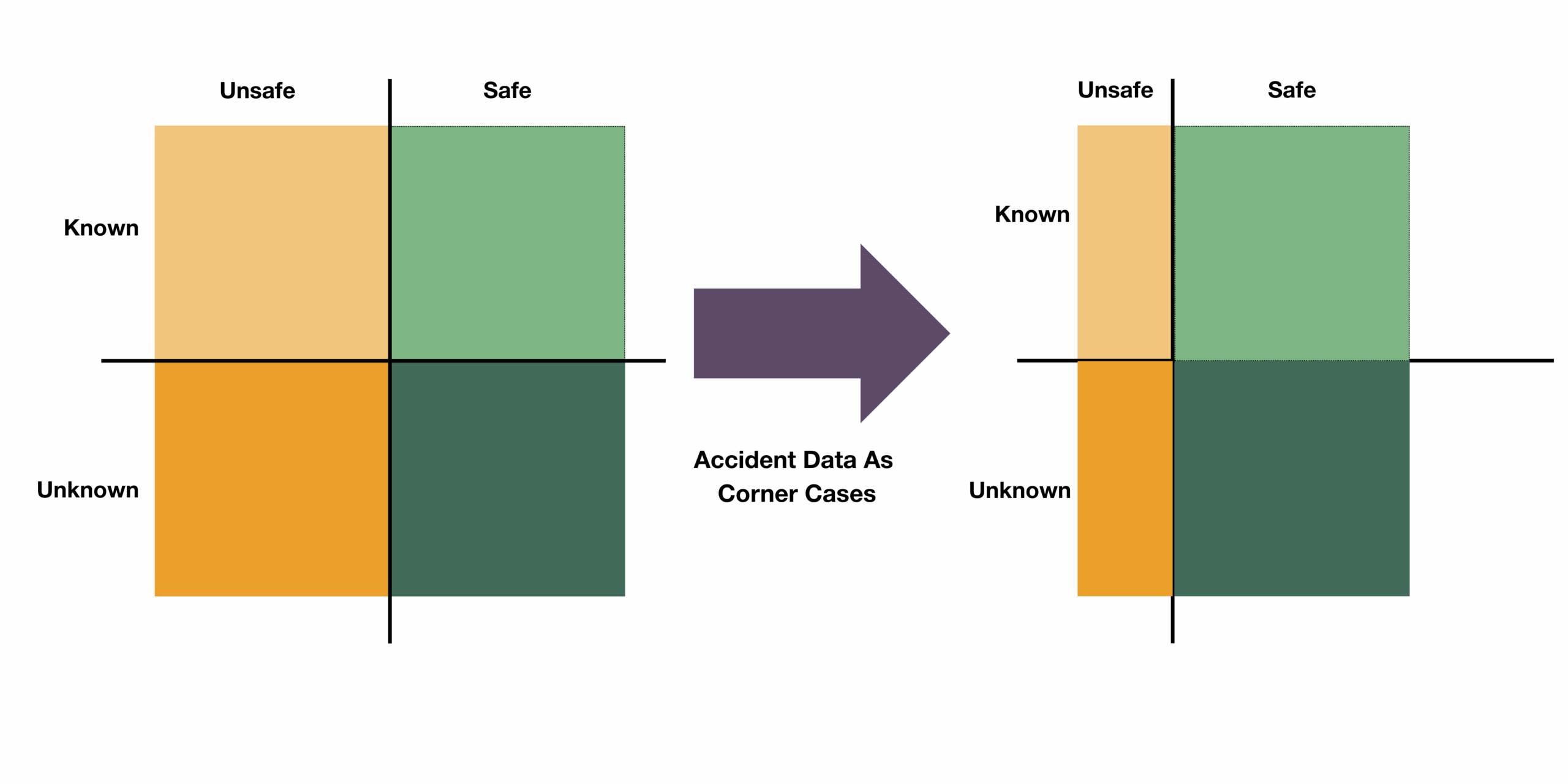
Figure 2: SOTIF goals – accident scenarios as corner cases.
By aligning accident reconstruction with SOTIF, developers can expand their coverage of edge cases and validate safety beyond traditional fault-based approaches.
Methods for Accident Scenario Reconstruction
There are multiple approaches available for reconstructing accident scenarios, each with its advantages and limitations.
1. Manual Reconstruction
Traditionally, reconstruction has been performed manually by accident investigators using:
- On-site evidence (skid marks, debris fields, vehicle damage)
- Eyewitness testimony
- Event data recorders (EDRs or “black boxes”)
- Police reports and photographs
While detailed, manual methods are time-intensive, prone to human bias, and difficult to scale for systematic safety validation.
2. Physics-Based Modeling
Another approach uses physics-based models to reconstruct accidents. These models rely on:
- Kinematics and dynamics equations
- Vehicle properties (mass, braking force, acceleration)
- Road surface and environmental conditions
Physics-based simulations can accurately reconstruct specific cases but require detailed input data, which is not always available in public databases.
3. Sensor and Video-Based Reconstruction
With the advent of advanced sensors, reconstruction methods can leverage:
- CCTV footage
- Dashcam recordings and on-vehicle sensor data (lidar, radar, cameras)
These methods provide high-fidelity reconstructions but depend heavily on data availability, which is often restricted due to privacy and data-sharing regulations.
4. AI-Driven Reconstruction (Data Mining and Probabilistic Modeling)
A modern approach applies artificial intelligence to accident reconstruction by mining large-scale accident databases (example: Fatality Accident Reporting System FARS published by NHTSA USA) and generating plausible reconstructions. The process includes:
- Ingesting accident databases and normalizing them into a unified query table.
- Using contextual factors such as traffic, geography, and physics to fill in missing details.
- Generating multiple plausible sequences of events leading to an accident.
- Determining a priori trajectories (a priori with respect to the instant of the accident) of all actors
- Converting scenarios into standardized simulation formats (e.g., OpenScenario XML).
This approach scales well, reduces manual effort, and supports simulation-based safety validation across a wide range of real-world cases. The scenarios can be executed in driving simulators, enabling safety validation for advanced driver-assistance systems (ADAS) and autonomous driving functions.
Enhancing Scenario Quality
Regardless of the reconstruction method, the fidelity of scenarios can be improved by incorporating additional factors such as traffic density and flow patterns, environmental conditions (weather, lighting, road quality), and human behavioral aspects (reaction times, distraction)
These enrichments make reconstructed scenarios more representative of real-world complexities.
Deployment of reconstructed scenarios
Reconstruction frameworks—whether manual, physics-based, sensor-driven, or AI-based—can be deployed flexibly, from investigative use cases to large-scale simulation environments. AI-driven frameworks, in particular, are well-suited for scalable deployment models, including cloud-based and on-premise setups, addressing varying operational needs and data regulations.
Conclusion
Accident scenario reconstruction is a critical enabler for road safety, supporting everything from forensic investigation to autonomous vehicle validation. Traditional methods like manual reconstruction and physics-based models offer precision in specific cases but face challenges of scalability and data requirements. Sensor-based approaches provide rich detail where data exists but are limited by availability. AI-driven reconstruction brings scalability, probabilistic reasoning, and integration with simulation environments, making it a powerful tool for modern safety validation. When aligned with SOTIF, these methods collectively advance the transformation of unsafe unknowns into safe knowns, reinforcing the path toward safer mobility systems.
Coming soon….
In the second blog in this series, I will talk about PRISM, Vayavya’s AI-driven solution for mining accident databases and reconstructing concrete scenarios for downstream simulation. Stay tuned!!