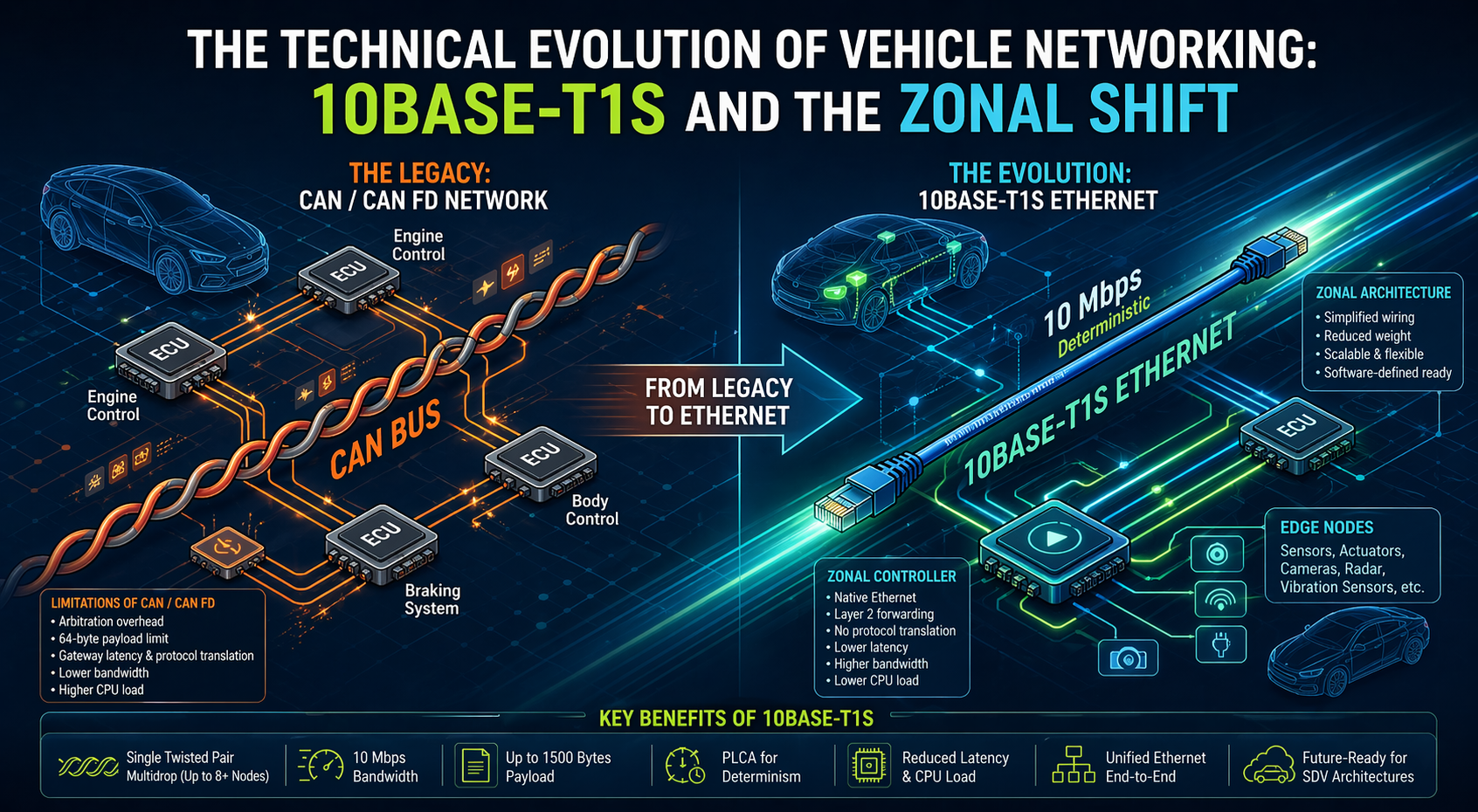
Explore how 10BASE-T1S extends Ethernet to the vehicle edge, enabling zonal architectures that replace legacy CAN with unified, deterministic networking.
A 101 Guide for Driver Developers on Path-Sensitive Analysis and State Tracking
Sparse enforces kernel pointer annotations GCC ignores. Catch __user, __iomem & endianness bugs early. A practical guide for Linux driver developers.
Static analysis helps you catch issues like type mismatches, memory leaks, null pointer dereferences, and incorrect API usage before your code runs.

Discover how Vayavya Labs' SOAFEE Cloud-to-Edge Blueprint enables virtual validation of autonomous driving stacks with behavioral parity & safety confidence.
Vayavya Labs has built the first integration between RemotiveTopology & the CARLA driving simulator, enabling system-level ADAS & ADS testing already at the SIL stage.
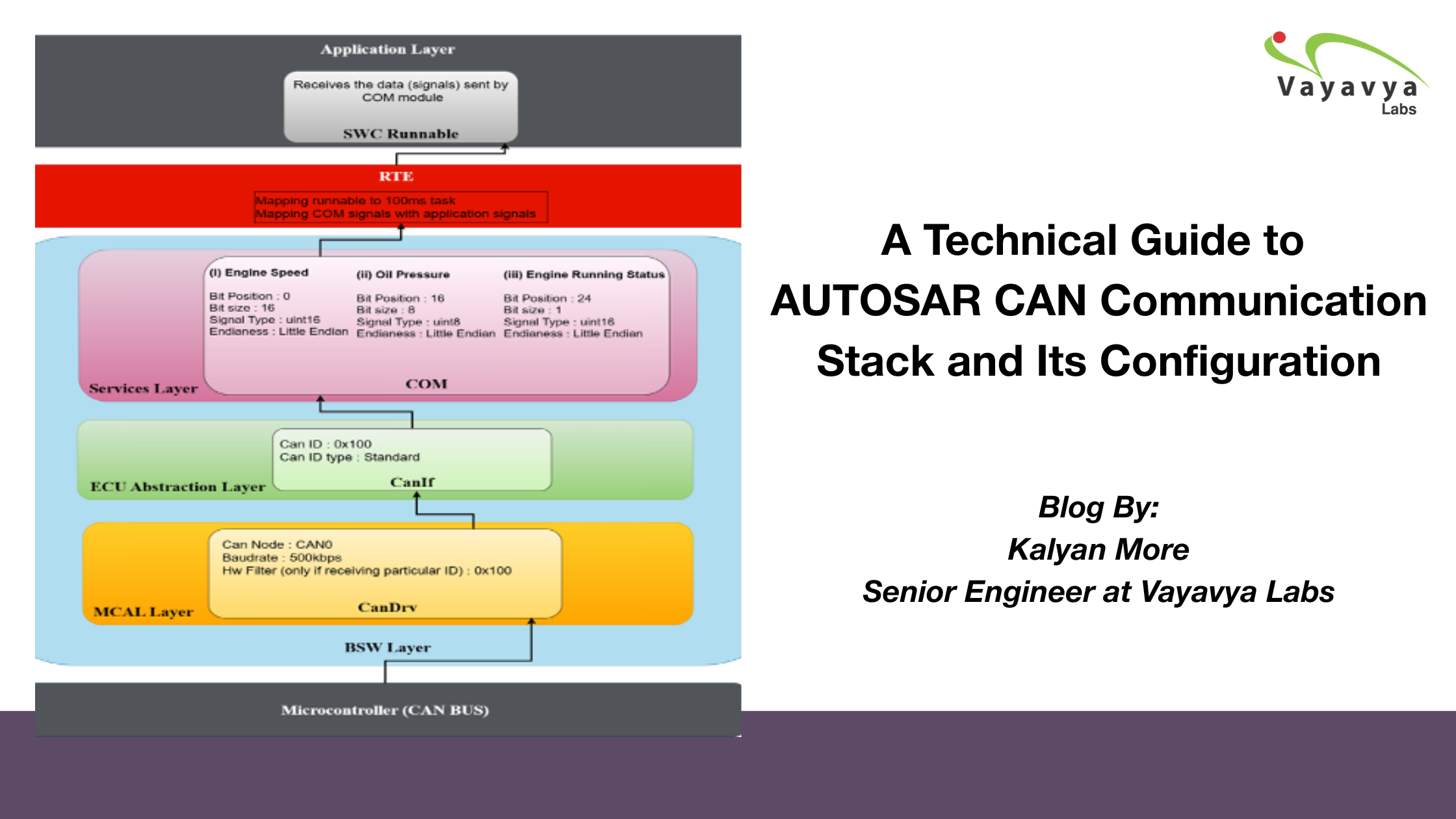
We know CAN is the backbone of in-vehicle communication, but have you ever wondered how AUTOSAR structures this data flow from application

Discover why simulation is the essential backbone for Embodied AI in autonomous driving. Learn how bridging the gap between real-world data and virtual stress-testing mitigates long-tail risks and builds trust in autonomous systems before they hit the road.